Humboldt Research Fellow Dr. Nelson Rosa found like-minded people in the team headed by Professor Dr. David Remy at the Institute for Nonlinear Mechanics. Not many researchers are concerned with helping robots to walk around and move like bi- and quadrupeds. Because this means that, depending on the speed, they change to a different gait, for example from walking to running or from walking to trotting and then galloping.
Learning from nature
Nelson Rosa was born in New York and became interested in robots at an early age. He completed his Bachelor of Engineering at the Thayer School of Engineering in Dartmouth, specializing in computer technology. He transferred to Northwestern University for his doctoral degree studies, where he was particularly involved with robotics.
“There are only a small number of scientists worldwide who work on the interface between walking robotics and nonlinear mechanics, taking into account different gaits,” says David Remy. The professor is pleased about having Nelson Rosa, whose work he had been aware of for some time, as a Humboldt Research Fellow at his institute for the next two years.
On the way to the optimal gait
If you now think that this is just about an urge to play, you are wrong. Robots that automatically switch between gaits according to the speed of their movement, just like humans and animals, have a great advantage – they save energy. “Besides energy efficiency, it is also important that the robots are fast and agile, and that the way they are programmed allows them to act in real time,” Nelson Rosa explains and also refers to the use of optimal materials.
A skilled climber on a steep face
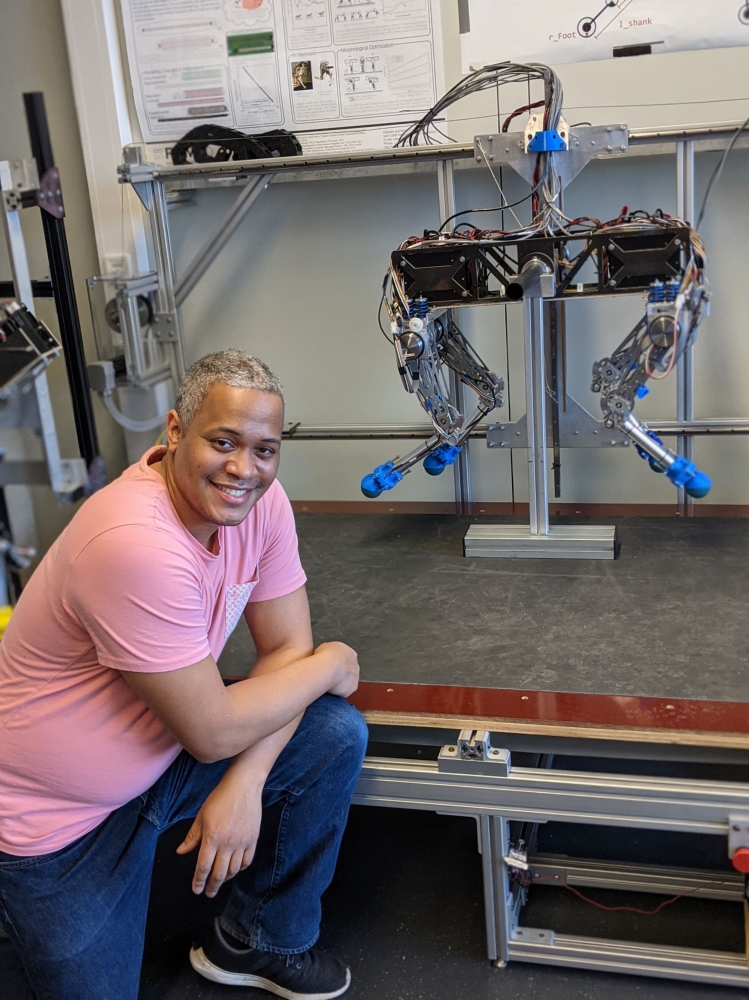
The robot that Nelson Rosa is working on during his time in Stuttgart stands out from its bi- and quadrupedal fellow robots. The dynamic climbing robot can switch between different gaits while climbing. While climbing a vertical steel wall, it uses the gait with the highest energy efficiency, like a monkey swinging from vine to vine in the jungle. Apart from its climbing skills, however, the robot does not bear much resemblance to the animal model: two limbs connected by a swivel joint and each equipped with a “hand”. The hands are electromagnets, so the robot can “hold on” to the steel wall.
Use in hazardous situations
There are many possible applications for these robots. Rosa’s skilled climber could, for example, check ship hulls. Robots equipped with legs could be used in areas that are too hazardous for humans or when it comes to rescuing people from dangerous situations. And in the rehab sector, for example, it could be possible for them to assist patients and help them get back on their feet.
First experiences in Stuttgart
Nelson Rosa has not seen anything of Stuttgart yet – cinemas, theaters, museums – everything is still closed. But he already managed to become lost in the city using the S- and U-Bahn, he tells us with a grin, and he already explored the woods together with his family. Step by step, he will familiarize himself with the new language, too. He has already found a teacher in his son, who occasionally quizzes him on some vocabulary.