Im Team um Professor Dr. David Remy am Institut für Nichtlineare Mechanik hat der Humboldt-Forschungsstipendiat Dr. Nelson Rosa Gleichgesinnte gefunden. Nicht viele Forscherinnen und Forscher beschäftigen sich damit, Roboter entsprechend den Zwei- und Vierbeinern zu Mobilität und Bewegung zu verhelfen. Das bedeutet nämlich, dass diese je nach Geschwindigkeit in eine andere Gangart wechseln, so etwa vom Gehen ins Laufen übergehen oder vom Schritt über das Traben in den Galopp kommen.
Lernen von der Natur
In New York geboren, hat sich Nelson Rosa schon früh für Roboter interessiert. Seinen Bachelor of Engineering absolvierte er an der Thayer School of Engineering in Dartmouth mit dem Schwerpunkt Computertechnik. Für seine Promotion wechselte er an die Northwestern University, wo er sich besonders mit der Robotertechnik beschäftigte.
„Weltweit gibt es nur eine Handvoll Wissenschaftler, die an der Schnittstelle von Laufrobotik und Nichtlinearer Mechanik arbeiten und sich dort mit verschiedenen Gangarten beschäftigen“, sagt David Remy. Der Professor freut sich, Nelson Rosa als Humboldt-Forschungsstipendiaten für die nächsten zwei Jahre an seinem Institut zu wissen. Auf die Arbeit von Rosa war er schon seit längerer Zeit aufmerksam geworden.
Auf dem Weg zum optimalen Gang
Wer nun denkt, hier sei der reine Spieltrieb ausgebrochen, liegt falsch. Roboter, die entsprechend der Geschwindigkeit ihrer Bewegung automatisch zwischen den Gangarten wechseln, so wie Mensch und Tier, haben einen großen Vorteil – sie sparen Energie. „Neben der Energieeffizienz geht es auch darum, dass die Roboter schnell und wendig sind, es deren Programmierung ermöglicht, dass sie in Echtzeit agieren können“, erklärt Nelson Rosa und verweist zudem auf den Einsatz optimaler Materialien.
Kletterkünstler an der Steilwand
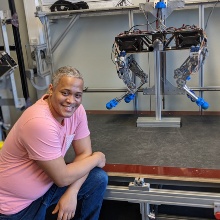
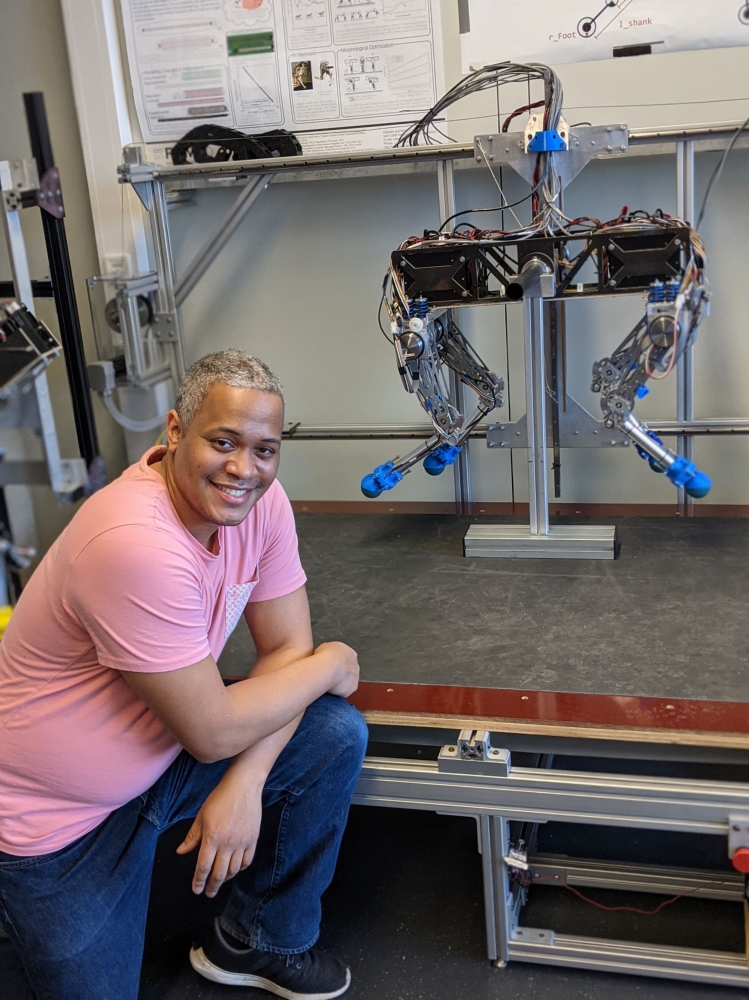
Der Roboter, an dem Nelson Rosa während seiner Zeit in Stuttgart forscht, hebt sich von seinen zwei- und vierbeinigen Kollegen ab. Der dynamische Kletterroboter kann zwischen verschiedenen Gangarten beim Klettern wechseln. Er nutzt die jeweils energieeffizienteste, während er an einer senkrechten Stahlwand klettert, gleich einem Affen, der sich im Urwald von Liane zu Liane schwingt. Bis auf die Kletterkünste ist die Ähnlichkeit mit dem tierischen Vorbild allerdings gering: zwei Glieder, die über ein Drehgelenk miteinander verbunden und mit jeweils einer „Hand“ ausgestattet sind. Bei den Händen handelt es sich um Elektromagnete, so kann sich der Roboter mit ihnen an der Stahlwand „festhalten“.
Einsatz in gefährlichen Situationen
Vielfältige Einsatzmöglichkeiten bieten sich für diese Roboter an. Der Kletterkünstler von Rosa könnte beispielsweise Schiffsrümpfe überprüfen. Die mit Beinen ausgestatteten Roboter könnten in Gefahrensituationen tätig werden, wenn es für Menschen zu gefährlich wird oder es darum geht, sie aus gefährlichen Situationen zu retten. Und im Reha-Bereich ist z.B. denkbar, dass sie Menschen dabei unterstützen und ihnen helfen, wieder auf die Beine zu kommen.
Erste Erfahrungen in Stuttgart
Von Stuttgart hat Nelson Rosa bisher noch nicht viel gesehen – Kinos, Theater, Museen – bisher alles geschlossen. Mit S- und U-Bahn hat er es in Stuttgart allerdings schon geschafft, sich zu verlaufen, erzählt er schmunzelnd. Zusammen mit seiner Familie hat er schon die Wälder um Stuttgart erkundet. Schritt für Schritt wird er sich auch der neuen Sprache annehmen. Einen Lehrer hat er in seinem Sohn schon gefunden. Der Filius fragt den Papa so manche Wörter ab.