
The international award is given by the “International Federation for the Promotion of Mechanism and Machine Science” (IFtoMM) through the “Technical Committee for Multibody Dynamics” and the Springer journal “Multibody System Dynamics”. The IFtoMM is a global organization that has been active for over 50 years and involves researchers from over 40 countries. The handover ceremony took place as a hybrid event during the “6th Joint International Conference on Multibody System Dynamics” (IMSD) in New Delhi.
How robots solve tasks together
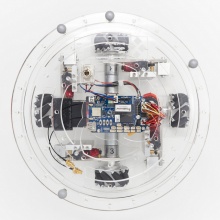
Henrik Ebel’s dissertation entitled “Distributed Control and Organization of Communicating Mobile Robots: Design, Simulation, and Experimentation” contributes to cooperative robotics by proposing methods that enable robots to solve complex tasks autonomously and cooperatively. The methodological contributions and issues range from mechanical modeling and simulation to information technology topics such as network communication to methods for the autonomous control and organization of the robot swarm. The dissertation spans from theory-driven method development to practical testing with a swarm of self-developed mobile robots. The robots repeatedly and autonomously adapt their solution strategies to changing conditions and the number of participating robots so that robot failures can also be compensated for. Some of the publications on which the dissertation is based are also contributions to Project network 4 “Data-Integrated Control System Design with Guarantees” of the Cluster of Excellence SimTech.
{kind=link}
From destructive behavior in technical systems and social networks
As a postdoc at the Institute of Engineering and Computational Mechanics, Ebel is continuing his research in the areas of multibody dynamics, robotics, and control engineering. In the coordination project of the newly established DFG Priority Program 2353, he is actively involved in research on artificially intelligent design assistants for the multidisciplinary, automated design of dynamic technical systems of the future. He also deals with networked and self-learning technical systems and investigates how destructive behavior by antagonistic actors and misinformation in such networks can be automatically detected and dealt with. The methods developed for this purpose can also provide food for thought for non-technical networks such as social networks. In addition to his activities in research and teaching, Ebel is an active member of the expert committee “Dynamics and Control Theory” of the Association of Applied Mathematics and Mechanics (GAMM), an appointed member of the GAMM Juniors, and a co-founder of the GAMM Junior Research Group at the University of Stuttgart, the largest of its kind in Germany. As a student, he was one of the first graduates of the interdisciplinary and research-oriented Simulation Technology program at the University of Stuttgart. This is closely associated with the SimTech Cluster of Excellence.
Original publication
Ebel, H., (2021). Distributed Control and Organization of Communicating Mobile Robots: Design, Simulation, and Experimentation. Schriften aus dem Institut für Technische und Numerische Mechanik der Universität Stuttgart, Volume 69, https://doi.org/10.2370/9783844081725

Henrik Ebel
Dr.-Ing.(2016 - 2024)