
From the city to the airport by air taxi: Since the airport operator Fraport and the startup Volocopter from Bruchsal have been investigating the integration of autonomous air taxis into the operations at Frankfurt Airport, this is no longer fiction. The safety and reliability of the new aircraft is ensured by a control software whose algorithms were developed in cooperation with the Institute of Flight Mechanics and Control at the University of Stuttgart.
Volocopters are emission-free multicopters powered by 18 electric motors that can take off and land vertically. They are based on drone technology and can fly two people almost a distance of 30 km – emission-free and low-noise. Since their need for physical infrastructure such as traffic areas is low, multicopters can be used very flexibly. Therefore, they are considered a promising solution to meet part of the increasing transport needs in metropolitan areas and to alleviate bottlenecks in transport infrastructure.
Unlike aircraft stabilization through the aerodynamics of wings and empennage, multicopters are stabilized by the torque of each propeller. This does not work mechanically, but through a flight control system that draws the necessary information from various, multi-installed sensors. Such systems already exist in the field of unmanned drones. However, they can only be transferred to manned multicopters to a limited extent, because a failure of the system could have fatal consequences. Therefore, the requirements in regard to reliability and safety are particularly high. At the same time, due to the large payload, the power reserves of manned multicopters are much lower than those of conventional drones.
Furthermore, manned flight places additional demands on handling and comfort. All these challenges make suitable algorithms for flight control, as developed in the cooperation between Volocopter and the Institute of Flight Mechanics and Control at the University of Stuttgart, a key aspect for the realization of air taxis.
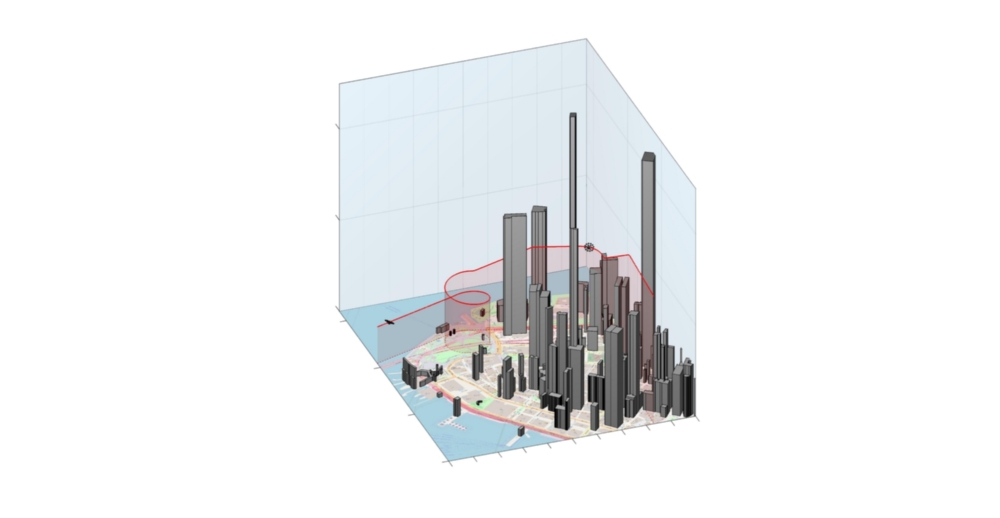
How does the Volocopter get through a city with high-rise buildings?
For flight control, Volocopter is developing its own flight control system, which includes both hardware and software components. It covers the complete range of functions from trajectory planning to engine control. The pilot can optionally specify target values using a control stick or define waypoints. In the latter case, a planning software generates three-dimensional flight paths or, alternatively, four-dimensional trajectories from these waypoints. These adhere to the physical limits of the aircraft. In this way, complex aircraft movements in urban surroundings can be realized in a generally valid representation and the trajectories are flyable.
Due to the high safety requirements for manned multicopters, the flight control system is designed with multiple redundancy. All algorithms developed by the University of Stuttgart in this context have a deterministic behavior and guarantee a limited computational time.
Based on existing algorithms, the flight control system is a basis for enabling autonomous flying in an urban environment in the future. In the next step, the system is to be expanded with methods for detecting static and moving obstacles, so that the Volocopter can avoid them. The flight control software is currently being certified for use in manned aviation and extensively tested on the Volocopter 2X. The data from the first tests show that the system follows the pilot commands very well, which provides the basis for the safe operation of the system as an electric air taxi.
Expert Contact:
University of Stuttgart, Institute of Flight Mechanics and Control,
phone: +49 (0)711 685-67060, E-Mail