
Usually machine tools are used in industrial manufacturing and the machining of materials. CNC machine tools can machine metal parts with a precision in the micrometer range. But this precision is not required everywhere. Using robots would be significantly cheaper. A machine tool usually costs more than EUR 100,000, while the cost of a robot is a factor of 2-3 less. That is why scientists are looking for ways to replace machine tools with industrial robots, as far as the application allows.

Prof. Alexander Verl, Head of the Institute for Control Engineering of Machine Tools and Manufacturing Units (ISW) and a team of international authors compiled a publication in which possible fields of application of robots, technological approaches to and the limits of their use, and what experience was gained in the process are compiled. For the publication “Robots in machining” in CIRP, the journal of the International Academy for Production Engineering, the group considered about 400 papers.
Original publication
Verl, Alexander; Valente, Anna; Melkote, Shreyes; Brecher, Christian; Ozturk, Erdem; Tunc, Lutfi Taner. (2019) Robots in machining. In: CIRP Annals, Volume: 68, Issue: 2, Pages: 799-822, https://doi.org/10.1016/j.cirp.2019.05.009.
Robots are not only less expensive. When they are used, there is also a larger workspace available. Besides machining, they are also able to perform handling tasks. The use of robots is particularly interesting for the production of goods in smaller quantities, which don’t require high precision.
Control engineering can compensate for errors
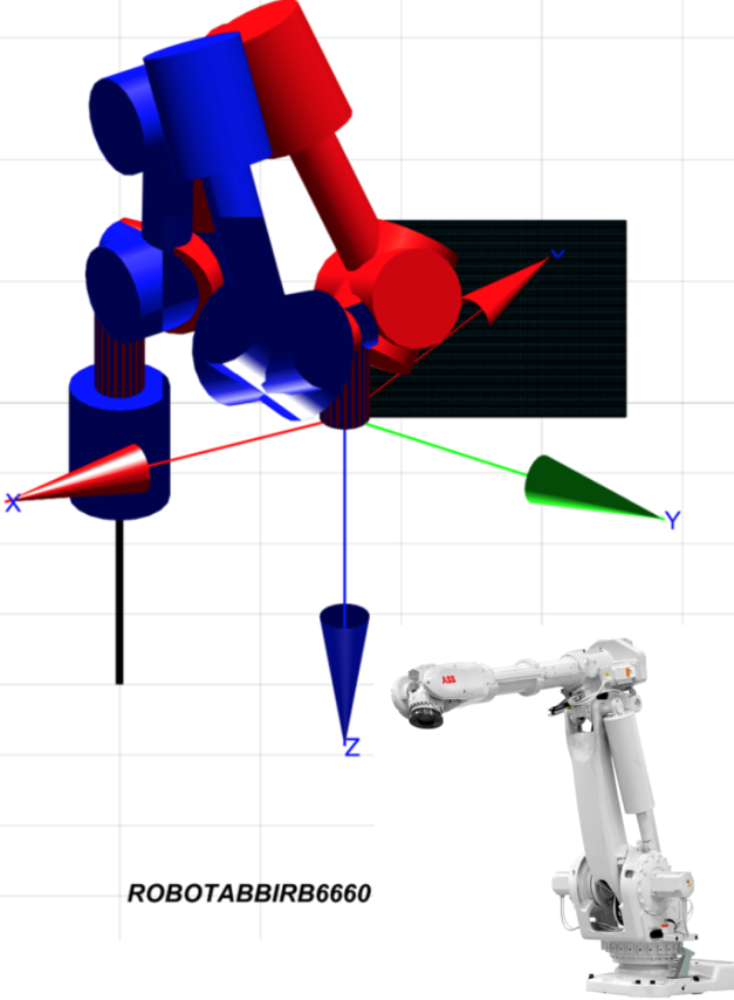
A “normal“ industrial robot, for example, is optimized to perform the task of spot welding. In applications with greater process forces (e.g. milling), however, the flexibility of the joints leads to unacceptable inaccuracies, and metal components can therefore not be machined with sufficient precision. “There are various approaches to improve the precision of robots. This is possible by programming the robot accordingly: The nominal paths of the robot’s motion are generated in such a way that errors due to the robot’s flexibility are compensated for. In addition, redundant degrees of freedom can be used to choose the most rigid configuration in each case. Finally, through experimentation, the remaining residual error can be learned and taken into account in the next run,” Prof. Alexander Verl explains.
{kind=link}
“However, the flexibility of a robot is highly nonlinear and asymmetrical, meaning that it’s not identical in terms of tensile or pressure load and therefore not easily predictable,” says Verl. It makes a difference, for example, in which spatial direction the milling process is taking place and whether down milling or up milling is applied. “It’s not easy and not always possible to program the robot in such a way that inaccuracies are compensated for,” says Verl. “At our institute, one of the things we are trying to do is to create a digital twin for a robot’s deviations from a nominal path. With this model, we determine the robot’s behavior in order to include this accordingly in the tolerances.”
Prof. Alexander Verl concludes: “The publication shows the different approaches that are available to make robots suitable for new machining tasks in which greater process forces occur.”

Robots create lightweight structures
Robots are suitable for applications such as removing cut edges (deburring) or sanding off rust. Robots could be used virtually anywhere that micrometer accuracy is not required for milling. That is often the case with materials such as wood, foam, concrete, and marble. This renders robots interesting for use in architecture and lightweight structures. For example, robots manufactured the components of the pavilions made of wood or carbon fiber that were designed by the Institute for Computational Design (ICD) and the Institute of Building Structures and Structural Design (ITKE) for the BUGA 2019 (federal garden exhibition), among other things. These components must fit exactly, but in the millimeter rather than the micrometer range. No two parts are alike, everything was cut out individually by the programmed robot. „Our expertise is also used in the university’s two Clusters of Excellence ‘Integrative Computational Design and Construction for Architecture‘ and ‘SimTech – Data-Integrated Simulation Science‘“, says the head of the institute.
The construction sector as a new field of application
If the robots’ application possibilities are further optimized, an appropriately programmed robot can produce components at the push of a button. Verl hopes that the construction sector will be a new field of application in the future, complementing the automotive and electronics sectors. “Some of the technologies are already being used in the construction of prefabricated houses. In ten years, you will be able to do a lot more. Our long-term vision is to print the shells of buildings and houses,” Alexander Verl describes the future tasks of robots.