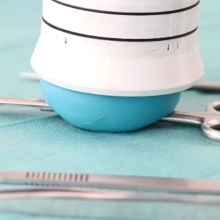
In fließenden Bahnen bewegt sich der Greifroboter über ein steriles Besteck mit Skalpellen, Pinzetten und Klemmen. Zwei Greifarme kreisen über den Instrumenten, um sich in Position zu bringen. An den Enden heben sich jeweils halbrunde, türkisfarbene Halbkugeln ab. Das sind die Greifer, die dem Roboter ermöglichen, beliebige Instrumente sicher zu greifen – ähnlich wie der/die Operationstechnische Assistentin*in (OTA): die Scrub Nurse.

Was ist eine Robotic Scrub Nurse?
Die türkisfarbenen Greifer sind das Herzstück der Robotic Scrub Nurse. Mit dieser neuartigen Technologie beschäftigt sich Jolanda Friedrich, Studentin der Medizintechnik an den Universitäten Stuttgart und Tübingen, in ihrer Abschlussarbeit. „Die Idee ist, dass die Robotic Scrub Nurse eine OTA beim Anreichen von Instrumenten und Material im OP unterstützt“, sagt die frischgebackene Absolventin.
Gemeinsam mit ihrem Betreuer Max Schäfer, Doktorand am Institut für Medizingerätetechnik (IMT) und dem Leiter des IMT Prof. Peter Pott, hat sie eine Technologie entwickelt, die die Robotic Scrub Nurse zu einem praktikablen Assistenzsystem im OP-Saal macht. „Robotische Assistenzsysteme könnten bei operativen Standardeingriffen Teilaufgaben übernehmen und so unter Umständen den Fachkräftemangel kompensieren“, sagt Pott. „Angesichts des Fachkräftemangels spricht es für sich, Roboter künftig verstärkt in Kliniken einzusetzen, um das Personal zu entlasten und für andere Aufgaben einzuteilen.“
Mit der Greifer-Technologie neue Einsatzmöglichkeiten schaffen
„Meine Aufgabe war es festzulegen, was der Greifer können soll und was er dafür braucht“, erklärt Friedrich. „Im Fokus meiner Arbeit stand, den Greifer so zu konstruieren, dass er Objekte greifen, zum Ablageort bringen und dort wieder ablegen kann.“
Dafür eignet sich, so Friedrich, ein universeller Jamming Gripper am besten. Dieser Greifer besteht aus einem Granulatsack, der, sobald er mit leichtem Druck auf ein Objekt aufsetzt, dieses zum Teil umschließt und sich so an dessen Form anpasst. Dabei ist im Sack ein Vakuum notwendig. „Das kann man sich vorstellen wie ein Päckchen Kaffee“, erklärt Friedrich. „Verschlossen ist das Kaffeepulver hart, sobald man die Packung öffnet, kommt die Luft hinein und das Pulver wird weich. Genau das passiert beim Greifen, nur umgekehrt.“ Die Vorteile dieser Greiftechnik liegen auf der Hand: sie ist kostengünstig, hygienisch und auf jede Art von Material und Form anwendbar.

Einsatz unter realen Bedingungen erfordert noch jahrelange Forschung
Zwar agiert der Scrub Nurse Robot bislang nur auf manuellen Befehl, jedoch ist der Greifer mit den notwendigen technischen Ansätzen ausgerüstet, um einmal eigenständig agieren zu können. „Wir arbeiten am Institut an einer kamerabasierten Objekterkennung“, erklärt Schäfer, der sich in seiner Promotion mit robotischer Assistenz im OP-Saal beschäftigt. Es handelt sich dabei um ein Bildgebungssystem, das mittels einer Kamera am Greifarm erkennen kann, was vor ihm liegt und wo es sich befindet. „Außerdem soll die Robotic Scrub Nurse durch Sprach- oder Gestensteuerung mit der Operateurin oder dem Operateur interagieren können.“
Ersetzen wird die Robotic Scrub Nurse eine OTA wohl zunächst nicht. „Das ist auch nicht die Idee“, betont Schäfer. „Die vielfältigen Tätigkeiten einer OTA können kaum mit einem einzelnen technischen System abgedeckt werden, es geht vielmehr um eine Unterstützung im OP. Eine Technologie kennt zum Beispiel nicht die individuellen Vorlieben der Chirurgin oder des Chirurgen. Momentan arbeiten wir an einer automatisierten Situations- und Prozesserkennung, um zum Beispiel anstehende Arbeitsschritte zu identifizieren - hier gibt es aber noch viel zu tun.“
{kind=link}
Medizintechnischer Nachwuchs entwickelt die Technik von morgen
„Was wir den Studierenden beibringen, ist Probleme zu lösen“, so Pott. Dazu gehören methodisches Vorgehen, ein breites technisches Grundlagenwissen und Projektmanagement. „Ich sehe es gerne, wenn die Studierenden etwas Praktisches machen möchten und freue mich, zu beobachten wie sie daran wachsen.“
An den beiden Standorten, Stuttgart und Tübingen, profitieren die Studierenden sowohl von einer ausgezeichneten technischen, als auch medizinischen Ausbildung. „Was das Studium der Medizintechnik an den Universitäten Stuttgart und Tübingen ausmacht, sind die freien Wahlmöglichkeiten“, sagt Pott. In den ersten vier Semestern erwerben die Studierenden die Grundlagen, und können danach aus einer Vielzahl technischer und medizinischer Vorlesungen ihren individuellen Schwerpunkt festlegen. Den Absolventinnen und Absolventen stehen neben beruflichen Tätigkeiten in Forschung und Entwicklung auch die Bereiche Qualitätssicherung, Marketing und Vertrieb sowie Medizingeräteberatung und die Regulatorik offen.
Nach ihrem Abschluss will Friedrich einige Monate reisen, ehe sie mit dem Masterstudium beginnt. „Die Entwicklung des Greifers hat mein Interesse für Automatisierungstechnik geweckt“, sagt Friedrich. „Darüber im Masterstudium mehr zu erfahren, fände ich spannend.“

Jacqueline Gehrke
Onlineredakteurin