Was uns Menschen mühelos gelingt, sollen Roboter künftig selbstständig lernen: eine Vielzahl unterschiedlicher Bewegungen auszuführen. Doch braucht es dazu den komplizierten Bewegungsapparat des Menschen oder waren Muskeln eher ein evolutionärer Zufall? Forscherinnen und Forscher um die Professoren Marc Toussaint und Syn Schmitt untersuchen, ob ein intelligenter Roboterarm dank künstlicher Muskeln Bewegungen schneller und einfacher lernt.
Nach einem Glas greifen, einen Brief schreiben, den Ball werfen und fangen, gehen, hüpfen oder balancieren: Der Mensch ist zweifellos ein Multitalent. Zwar gibt es schon Roboter, die einzelne Bewegungsabläufe beeindruckend gut beherrschen, etwa Pfannkuchen backen, eine Flasche aufschrauben oder hüpfen. Es ist aber bisher noch kein Roboter bekannt, der etwa auf einer Slackline balancieren könnte oder das nötige Fingerspitzengefühl hätte, um mit dem Finger über eine Smartphone-Oberfläche zu wischen. „Das hört sich trivial an, aber solche Bewegungen sind gar nicht so leicht zu regeln“, sagt Marc Toussaint, Leiter der Gruppe Maschinelles Lernen und Robotik am Institut für Parallele und Verteilte Systeme der Universität Stuttgart. Beim Wischen etwa muss der Finger die Oberfläche detektieren und währenddessen ständig den Kontakt halten. „Der Roboterfinger würde schnell zu stark drücken und dann quasi stolpern“, erklärt der Experte für Künstliche Intelligenz und ahmt mit seinem Finger die klopfende Vorwärtsbewegung des Roboterfingers nach.
In dem Projekt „Deep Control“, das Toussaint koordiniert, untersuchen Physiker, Informatiker und Regelungstechniker, ob Muskeln helfen könnten, die Bewegungen von Robotern besser zu regeln, damit diese künftig auch komplizierte Bewegungsabläufe durchführen können. Als Testobjekte dienen Computersimulationen und ein muskelbepackter Roboterarm, der autonom lernen soll, irgendwohin zu zeigen. Die Baden-Württemberg Stiftung fördert das Vorhaben im Rahmen ihres Forschungsprogramms Neurorobotik seit Frühjahr 2017 für insgesamt drei Jahre. Zudem sind beide Physiker auch in der „Cyber Valley“-Initiative des Landes Baden-Württemberg zur Förderung der Forschung zu Künstlicher Intelligenz aktiv. Bisher werden die Gliedmaßen von menschenähnlichen Robotern nach dem Vorbild von Industrierobotern meist direkt von Elektromotoren gedreht und gebeugt. Zwar können heutige Roboter bereits sehr präzise irgendwohin zeigen, aber der Aufwand dafür ist hoch. „Um einen Roboterarm von einem Punkt zum nächsten zu bewegen, muss der Regler in jeder Millisekunde neue Signale an den Motor schicken“, sagt Toussaint. Parallel messen Sensoren zu jedem Zeitpunkt, wo sich der Arm befindet. Das menschliche Gehirn habe es in der Hinsicht einfacher: Es brauche nur einen Nervenimpuls an die Armmuskulatur zu schicken, woraufhin die Muskeln kontrahierten und der Arm automatisch die Bewegung ausführe, so Toussaint.
Regelungsalgorithmen von muskelgetriebenen Robotern bleibt gar nichts anderes übrig, als Bewegung zu lernen.
Prof. Marc Toussaint

Unberechenbares Muskelspiel
Stattet man Roboter mit künstlichen Muskeln aus, in der Hoffnung, dass sie dadurch künftig auch schwierigere Bewegungen durchführen können, so müssen sie wie der Mensch die Bewegung erst lernen. Die menschliche Bewegung ist nämlich ein komplexes Zusammenspiel von verschiedenen Gehirnarealen, unterschiedlichen Muskelgruppen, die sich zeitlich exakt koordiniert an- beziehungsweise entspannen, und Sehnen, die die Muskelkraft auf die Knochen übertragen. „Regelungsalgorithmen von muskelgetriebenen Robotern bleibt gar nichts anderes übrig, als die Bewegung zu lernen“, erklärt Toussaint. „Wenn ich die Gelenke mit Motoren direkt ansteuere, kann ich über die Gelenkwinkel ausrechnen, wo der Finger gerade ist und dann über einen Algorithmus den Finger in eine gewünschte Position bringen. Das ist simple Mathematik“, sagt Toussaint. Wolle man aber Muskeln als weitere Regelungsebene einführen, gebe es keine Mathematik. Nicht von ungefähr lautet der Name des Projekts „Deep Control“, was nichts anderes bedeutet als tiefe Kontrolle der Bewegung über mehrere Hierarchieebenen.

Inzwischen haben zwei Masterstudenten der Informatik aus Toussaints Forschungsgruppe das „Gehirn“ für einen Roboterarm programmiert, einen intelligenten Ansteuerungsalgorithmus, der auf maschinellem Lernen beruht. Syn Schmitts kürzlich umbenannte Forschungsgruppe „Computational Biophysics and Biorobotics“ hat sozusagen die künstlichen Muskeln, Sehnen und Knochen beigesteuert. Der Roboterarm existiert einerseits rein virtuell als Simulationsmodell auf dem Computer. Zusätzlich hat Schmitt, Co-Direktor des neuen Instituts für Modellierung und Simulation biomechanischer Systeme, einen realen lebensgroßen Torso mit rechtem Arm bauen lassen.
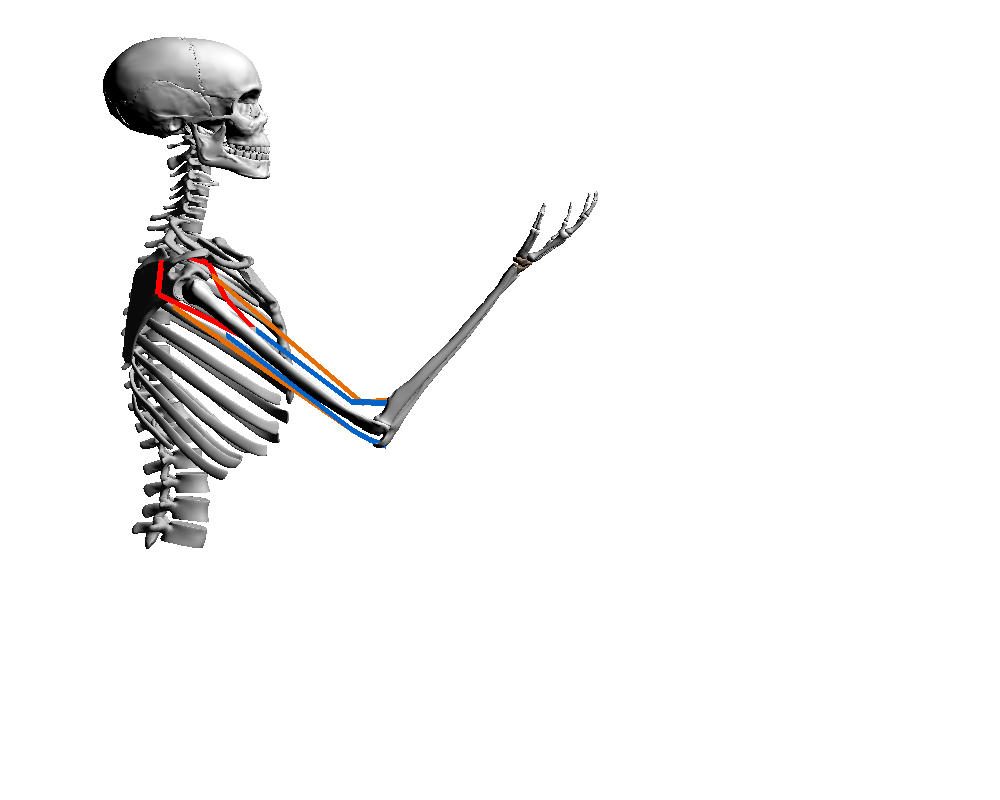
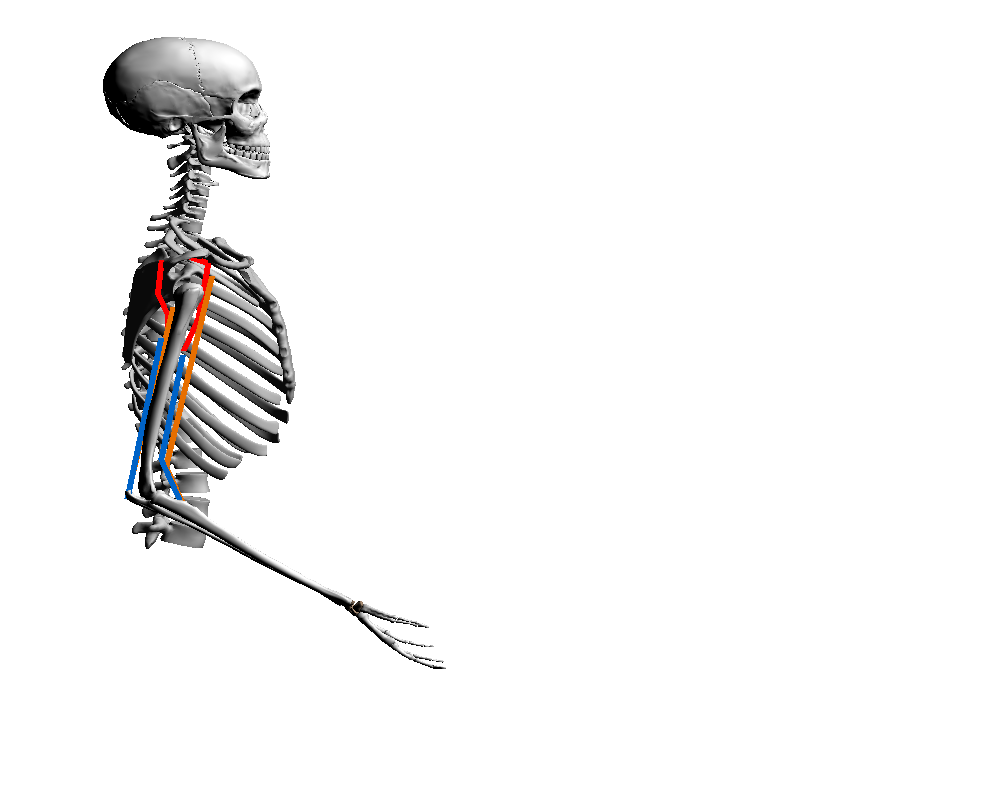
Der metallene Roboterarm ist über ein Schulterund Ellenbogengelenk beweglich und mündet in eine starre Hand mit ausgestrecktem Zeigefinger. Als Muskeln dienen dem Arm Zylinder aus einem druckdichten Gummischlauch mit innen liegendem Garngelege. Sie werden pneumatisch betrieben: Sobald ein Kompressor Druckluft in den Schlauch presst, dehnt er sich aus und wird wie der natürliche Muskel dicker und kürzer. Er kontrahiert. Insgesamt fünf dieser künstlichen Muskeln lassen den Roboterarm in einer Ebene nach unten, oben, vorne oder hinten schnellen.
Dafür spielen die Muskeln ähnlich zusammen wie beim menschlichen Vorbild: Ein „Bizeps“-Muskel auf der Oberseite des Oberarms setzt am Ellenbogengelenk an und beugt den Arm, sein Gegenspieler, der „Trizeps“-Muskel auf der Rückseite des Oberarms, streckt den Arm wieder. Nach dem gleichen Prinzip bewegen zwei antagonistische Muskeln im Torso das Schultergelenk. Ein weiterer Muskel im Torso kann den Arm im Schultergelenk sowohl nach vorne bewegen als auch beugen. Zusätzlich haben Schmitts Mitarbeiter fingerdicke Sprungfedern als Sehnen eingebaut, die oben am Schultergelenk herausragen, außerdem verschiedene Sensoren, die die Kraft und die Länge der künstlichen Muskeln sowie den Gelenkwinkel messen und an den Computer melden.
Roboter lernt wie ein Baby aus Erfahrung
Doch wie lernt die Künstliche Intelligenz des Roboters, genauer der dahintersteckende Regelungsalgorithmus, den Arm gezielt irgendwohin zeigen zu lassen? Vereinfacht gesagt, lernt sie so wie ein Baby, das anfangs unkoordiniert herumzappelt und aus den Erfahrungen, die es macht, irgendwann zu besser koordinierten Bewegungen übergeht. „Anfangs hat der Algorithmus keine Idee, welche Signale er an den Muskel schicken muss, um den Arm an einen gewissen Punkt zu bewegen“, erklärt Toussaint. Also schickt er ein beliebiges Signal, und der Arm bewegt sich vielleicht nach unten. Diese Erfahrung speichert er als Datenpunkt ab. Aus diesem ersten Datenpunkt generiert er ein grobes Modell, nämlich wie er den Arm nach unten oder oben bewegen kann. Zurück in der Ausgangsposition schickt er als Nächstes zufällig vielleicht ein gegenteiliges Signal und tatsächlich bewegt sich der Arm in die entgegengesetzte Richtung. Das ist der zweite Datenpunkt. „Das bringt den Arm bestimmt noch nicht zum richtigen Ziel, aber eventuell schon viel näher“, sagt Toussaint.
So vergeht Runde um Runde, in der das künstliche neuronale Netz trainiert und das gelernte Modell immer genauer wird: Bis zu 700-mal, in der Simulation sogar über 1.000-mal, immer wieder eine neue Zeigebewegung. Die virtuelle „Landkarte“ füllt sich allmählich mit Datenpunkten. Darin ist jedem möglichen Ziel, das der Arm angesteuert hat, das nötige Muskelsignal zugeordnet. „Wenn der Arm in Zukunft nach unten will, dann weiß er das jetzt, weil er zuvor die Erfahrung ‚nach unten‘ gemacht hat“, erklärt Toussaint. Die Lernmethode geht auf sogenannte tiefe Lernverfahren (Deep Learning) zurück, die bereits seit Jahren bei der Bilderkennung oder beim Spracherkennungsmodul von Siri, dem digitalen Assistenten auf dem iPhone, eingesetzt werden. Dabei wird ein Netzwerk von Knoten, die den Neuronen im Gehirn entsprechen, zu Ebenen angeordnet, die immer komplexere Merkmale verwenden, um etwa ein Gesicht zu erkennen. Beispielsweise wird die erste Ebene nur Helligkeitswerte der Pixel identifizieren. Die zweite Ebene würde registrieren, dass einige Pixel zu Kanten verbunden sind. Die nächste wiederum würde zwischen horizontalen und vertikalen Linien unterscheiden, bis irgendwann eine Ebene erreicht ist, auf der gelernt wird, welche Formen geeignet sind, um ein Gesicht zu erkennen. Beim verstärkenden Lernen (Reinforcement Learning) werden nach dem Prinzip von Zuckerbrot und Peitsche Verbindungen zwischen den Knoten entweder verstärkt oder abgeschwächt, je nachdem welche Erfahrungen nach jeder Trainingsrunde gemacht wurden.

„Wir haben uns gefragt, was das Analogon von dieser Idee der Signalverarbeitung ist, wenn es darum geht, ein System zu regeln“, sagt Toussaint, „Was bedeutet es für ein Regelungsproblem, immer mehr Hierarchieebenen einzuführen?“ Bislang gebe es kaum Konzepte für die Regelung von Roboterbewegungen, allenfalls für Computerspiele, in der etwa eine Spielfigur lernt, durch ein Labyrinth zu laufen oder bestimmte Aktionen auszuführen. Als wesentliche Neuerung haben die Forscherinnen und Forscher um Toussaint das „Gehirn“ des Roboters zusätzlich mit einer Explorationsstrategie ausgestattet, damit der Roboterarm während des Trainings systematisch seinen gesamten Bewegungsraum erkundet. „Wenn der Algorithmus als Nächstes ein Ziel auswählt, das total weit weg ist von allen vorhergehenden Zielen, wird er aus den Daten genauso wenig lernen, wie wenn er zig Mal das gleiche Ziel ansteuert“, erklärt Toussaint. Der Programmcode, den die Forscher eingefügt haben, sieht dagegen vor, dass der Roboterarm sich immer Ziele zwischen den beiden Extremen aussucht – von bisherigen Erfahrungen entfernt, aber nicht zu weit weg. „Dann ist garantiert, dass der Algorithmus am meisten aus den Erfahrungen lernt, die er macht“, sagt Toussaint.
„Aus Ingenieurssicht absoluter Quatsch“
Wenn Schmitt an seinem Institut nun den Knopf einer Fernbedienung drückt, fährt der Roboterarm zwar leicht schwingend, aber zielstrebig an die gewünschte Position. „Die Abweichung für einen Zielpunkt beträgt etwa acht Millimeter, in der Simulation sind es sogar weniger als zwei Millimeter“, berichtet er. Zukünftig könnte eine korrigierend eingreifende Kamera die Präzision noch erhöhen, hofft Schmitt. Doch was den Biophysiker am meisten antreibt, ist die Frage, warum die Biologie so komplizierte Dinge wie Muskeln hervorgebracht hat. Entstand der menschliche Bewegungsapparat evolutionsgetrieben, oder weil es schlicht keine anderen Baumaterialien gibt? „Aus Ingenieurssicht ist es absoluter Quatsch, sozusagen zwei Motoren, sprich antagonistische künstliche Muskeln, um ein Gelenk zu bauen, anstatt eines Elektromotors, der sich in beide Richtungen drehen kann“, analysiert Schmitt.
Die Antwort liefern die Stuttgarter nun selbst, indem sie den Roboterarm die Zeigebewegung einmal mit Muskelantrieb haben lernen lassen und einmal mit der direkten Gelenkansteuerung über einen Elektromotor. Die Ergebnisse haben sie anschließend miteinander verglichen. Tatsächlich wird die Regelung der Bewegung dank Muskeln und Sehnen einfacher. „Einfacher heißt besser verständlich, schneller erlernbar – das bedeutet, der Algorithmus braucht für das Training deutlich weniger Datenpunkte. Einfacher heißt auch, es braucht weniger Rechenaufwand, also kleinere Prozessoren, was zu mehr Energieeffizienz führt“, fasst Schmitt zusammen.
Bereits zuvor hat ein ehemaliger Doktorand Schmitts in der Computersimulation eines hüpfenden Roboters festgestellt, dass viel weniger Informationen zwischen den Sensoren, dem Regelungsalgorithmus und dem Antrieb ausgetauscht und verrechnet werden müssen, wenn der Roboter von Muskeln angetrieben wird. Das Maß, um den Kontrollaufwand für Bewegungen messen zu können, hat er eigens entwickelt. Im aktuellen Projekt testeten die Forschenden aber auch, was passiert, wenn der Arm in seiner Bewegung gestört wird, indem jemand dagegen drückt. Wird der Roboterarm danach immer noch präzise sein Ziel ansteuern? „Da sehen wir deutlich, dass das, was auf der Ebene der Muskeln gelernt wurde, viel robuster ist, als das, was auf der Ebene der Gelenke direkt gelernt wurde“, berichtet Toussaint.
Als Nächstes soll der Roboter lernen, eine richtig schwierige Aufgabe zu meistern: mit dem Finger entlang einer Oberfläche zu wischen. Bis sich ihre Forschungsergebnisse für einen marktfähigen Roboter nutzen lassen, sei es aber noch ein weiter Weg, schränken Toussaint und Schmitt ein. „Es gibt noch viele Herausforderungen: der begrenzte Bauraum, in dem viele mechanische Teile untergebracht werden müssen; die pneumatischen Muskeln, die einen Riesenkompressor brauchen; die Robustheit des Antriebssystems“, zählt Schmitt auf. „Im Grunde müssten wir jetzt testen, welche Muskelmodelle besonders gut funktionieren“, ergänzt Toussaint. Möglich, dass nach der Optimierung „die Muskeln“ dann gar keine Ähnlichkeit mehr mit echten Muskeln haben.

Seite an Seite mit dem Roboter der Zukunft
In Zukunft könnte der muskelbepackte, autonom lernende Roboter dann zum Einsatz kommen, wenn es auf natürliche, variantenreiche Bewegungen ankommt, oder der Roboter die Kraft, mit der er die Bewegung ausführt, an unvorhergesehene Ereignisse anpassen soll. Kollaborative Arbeitsplätze, wo Roboter und Mensch nebeneinander arbeiten, wären zum Beispiel so ein Bereich. Stoßen Mensch und Roboter zufällig aneinander, würde der Roboter nachgeben und ausweichen. Ein Industrieroboter kann das nicht. „Ich bin überzeugt, dass ein muskelgetriebener Roboter solche Ausweichaktionen viel einfacher durchführen kann“, sagt Schmitt. Denkbar sind auch natürlichere Exoskelette, die Arbeitern „Superkräfte“ verleihen, etwa für Überkopf- Montagen oder um schwere Lasten zu heben. In der Rehabilitation könnten sie Schlaganfallpatienten oder Querschnittgelähmten beim wieder Gehen lernen unterstützen. „Das Exoskelett würde lernen, zusammen mit dem Träger die Bewegung so auszuführen, dass sie adäquat ist“, sagt Schmitt. Noch sind Menschen den Robotern haushoch überlegen. Die nächste Stufe zu den intelligenten Robotern von morgen, die Toussaint in den kommenden Jahren erklimmen will: physikalisches Denken. Beispielsweise könnte ein Roboter, der einen Holzklotz greifen soll, aber nicht rankommt, versuchen, einen greifbaren Ball gegen die Wand zu schleudern, sodass dieser im richtigen Winkel abprallt. Beim Herunterfallen würde der Ball den Holzklotz in Greifnähe des Roboters rücken. Frei nach Neil Armstrong, ist diese Aufgabe ein kleiner Schritt für einen Menschen, aber ein großer Schritt für die Robotik.
Helmine Braitmaier
Prof. Dr. Syn Schmitt
Professor am Institut für Sport- und Bewegungswissenschaft, Universität Stuttgart