
Beim Roborace werden jedes Jahr SchülerInnen und Studierende mit einer neuen Aufgabe aus dem Bereich der Technischen Kybernetik herausgefordert. Nach der Startveranstaltung, bei der die Aufgabe bekannt gegeben wird, haben die TeilnehmerInnen etwa vier Wochen Zeit, in Teamarbeit auf Basis des LEGO-Mindstorms-EV3-Systems einen Roboter zu konstruieren, der die Aufgabe auf autonome Weise löst. Aufgaben aus den letzten Jahren waren zum Beispiel autonomes Abfahren einer gegebenen Strecke mit Hindernissen oder autonomes Folgen eines anderen Fahrzeuges.
SchülerInnen erhalten hierbei einen spannenden Einblick in das Studium der Technischen Kybernetik und die Arbeit als IngenieurIn. Studierende können auf eine interessante Art und Weise ihre erworbenen Kenntnisse anwenden und bekommen einen Ausblick auf das weitere Studium.
Weitere Informationen zum Roborace, eine Übersicht über vergangene Wettbewerbe und aktuelle Auschreibungen finden Sie hier.
Impressionen der Roborace Wettbewerbe
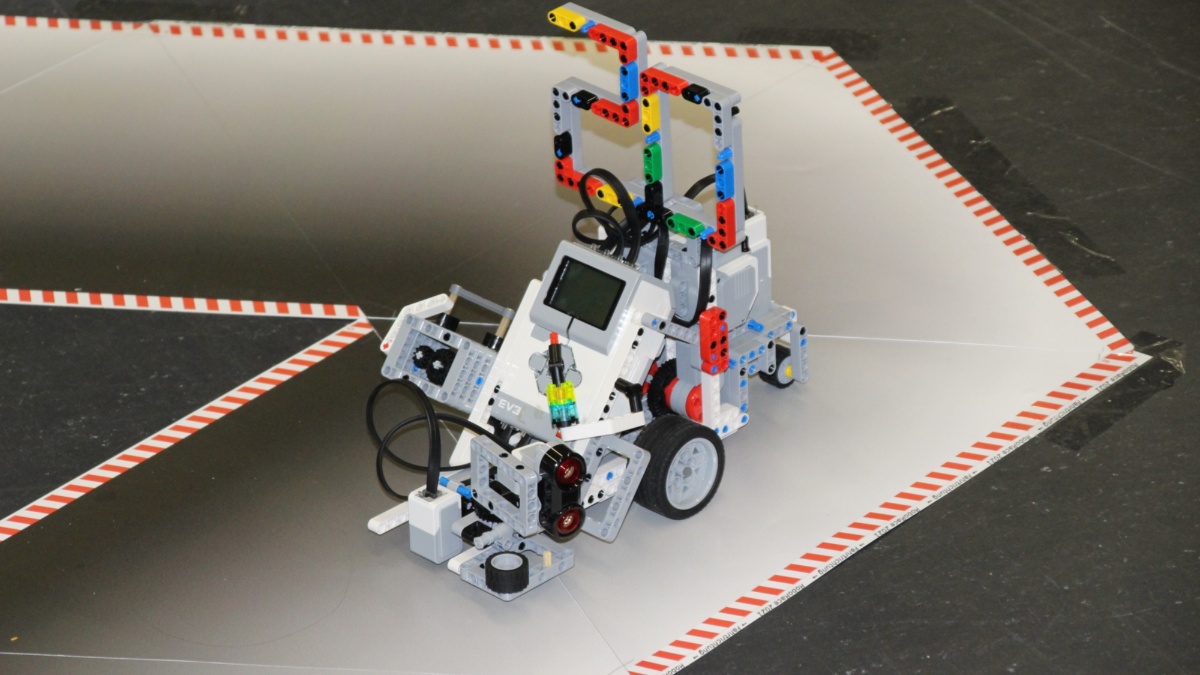
Roborace Winter 2021
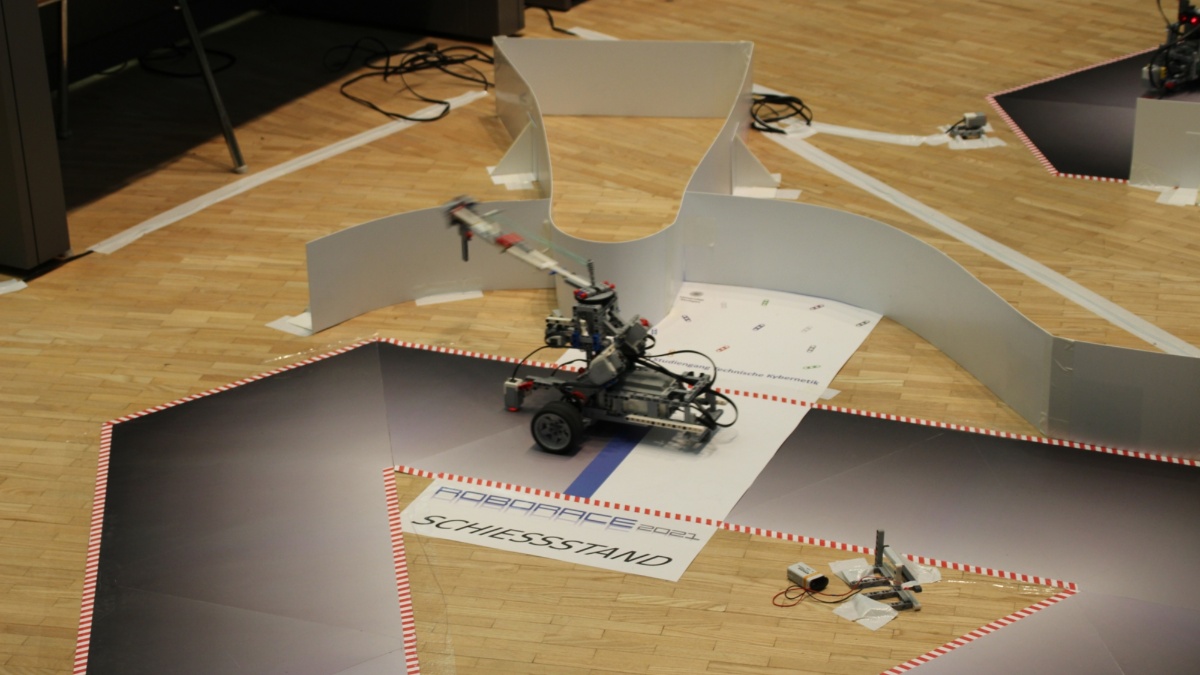
Roborace Sommer 2021

Roborace 2019

Roborace 2018
Roborace 2017

Roborace 2016

Roborace 2015
Roborace 2014
Roborace 2011

Roborace 2010
Roborace 2009
Roborace 2008
Ziel
Mit unserem Projekt möchten wir Schülerinnen und Schüler das Gebiet der Technischen Kybernetik näherbringen und die Neugierde für diese vielseitige Disziplin wecken. Die Technische Kybernetik ist eine moderne, interdisziplinär orientierte Ingenieurwissenschaft, die, vereinfacht gesprochen, den theoretischen Kern des Gebiets der Automatisierungstechnik bildet.
Projektablauf
Der Robotics-Wettbewerb bildet den Kern der Initiative. Die Teams sollen ein klar umrissenes Projekt aus dem Bereich der Technischen Kybernetik innerhalb eines Zeitraums von etwa vier Wochen bearbeiten. Speziell sollen autonom agierende Roboter auf Basis des LEGO Mindstorms Systems konzipiert und konstruiert werden. Das LEGO-Material wird zur Verfügung gestellt und muss nach Ende des Wettbewerbs wieder komplett an das Institut für Systemtheorie und Regelungstechnik zurückgegeben werden.
Wir achten darauf, die Aufgabe so zu stellen, dass sie sich durch angepassten Schwierigkeitsgrad und Aufwand, durch eine präzise vorgegebene Aufgabenstellung und durch einen hohen "Spaß- und Kreativfaktor" auszeichnet. Die Aufgabenstellung wird so festgelegt, dass die Lösungen der Teams in einem abschließenden Wettbewerb verglichen werden können
Voraussetzungen
Teilnehmen können Teams von vier bis sechs Schülerinnen und Schüler ab Klassenstufe 9 aus Schulen im Großraum Stuttgart. Darüberhinaus werden Studierende der Technischen Kybernetik, Mechatronik, Simulation Technology, Mathematik sowie Medizintechnik am Wettbewerb teilnehmen.
Jedem SchülerInnenteam muss vor Ort eine betreuende Lehrerin bzw. ein betreuender Lehrer zur Seite stehen. Fachliche und methodische Betreuung erhalten alle Teams durch wissenschaftliche Hilfskräfte (Studierende der Technischen Kybernetik aus höheren Semestern).
Wir bedanken uns bei den Partner und Unterstützer des Roborace!
News
Kontakte
Frank Allgöwer
- Weitere Informationen
- E-Mail schreiben
- Betreuender Professor
Simon Lang
- Weitere Informationen
- E-Mail schreiben
- Organisation
Studentische Hilfskräfte
- E-Mail schreiben
- Betreuung der TeilnehmerInnen