Institut für Ingenieurgeodäsie
Forschungsschwerpunkte und Projekte des IIGS
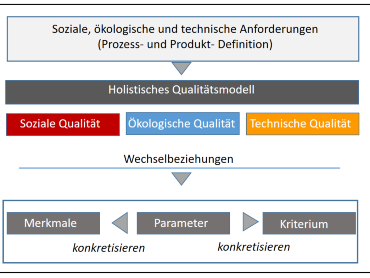
[Fotos: Shutterstock, IIGS, o.A., IIGS, o.A.]